
בניית פלטפורמה
משוונית לטלסקופ דובסוני
מאת : ד"ר יואב סינטוב.
במאמר זה מתואר תהליך בנייתה של פלטפורמה לטלסקופ דובסוני (מחזיר אור) המותאמת לשמי ישראל.

אנו מודים לד"ר יואב סינטוב אשר טרח לכתוב
ולחלוק את המאמר
עם הגולשים וחובבי האסטרונומיה.
תוכן עניינים
|
סעיף |
תוכן |
עמוד |
|
|
3 |
|
|
1 |
4 |
|
|
2 |
4 |
|
|
3 |
6 |
|
|
4 |
התיאוריה
הבסיסית של פלטפורמה משוונית בעלת שתי מסילות והנעה ישירה (על פי Warren Peters [1])ׂ |
9 |
|
4.1 |
10 |
|
|
5 |
14 |
|
|
5.1 |
15 |
|
|
5.2 |
22 |
|
|
6 |
27 |
|
|
7 |
28 |
|
|
8 |
28 |
|
|
נספח א' |
29 |
·
ציור 1: תנועת כדור
הארץ ושיטת העקיבה הנחוצה [1]
·
ציור 2: הגישה
הטכנית לפתרון בעיית העקיבה [1]
·
ציור 3: פלטפורמה
משוונית בעלת מיסב דרומי (באדיבות אנדרי הייקופ [2])
·
ציור 4 : הנעה
באמצעות בורג חלזוני [3]
·
ציור 5: מבט צד של
פלטפורמה משוונית עם שתי מסילות והנעה ישירה
·
ציור 6 מימדי המסילות
ומיקום גלגלי ההנעה שלהן [1]
·
ציור 7: דף
(ע"פ Warren Peters) עם פרוט נתוני
הפלטפורמה המשוונית בסנטימטרים שנבנתה עבור זווית הגבהה של 31.8 מעלות. הטלסקופ עבורו
תוכננה הפלטפורמה הינו StarHopper 10" של Celestron
·
ציור 8: חלקי לוח הבסיס ולוח הקרקע
·
ציור 9: חיתוך
מחזיקי המסילות באמצעות משור חשמלי (באדיבות André Heijkoop’ [2])
·
ציור 10: מחזיקי
הגלגלים עם הגלגלים מורכבים עליהם.
·
10א: מחזיקי
הגלגלים של המסילה הצפונית: 10ב: מחזיקי הגלגלים של המסילה הדרומית:
·
ציור 11: שיטת
הצמדת הגלגלים אל מחזיקי הגלגלים ומיקומם על פני המסילות (מתוך המאמר של Warren Peters [1])
·
ציור 12: לוח הבסיס
המוגמר
·
ציור 13: לוח הקרקע
עם מחזיקי הגלגלים מורכבים עליו
·
ציור 14: הפלטפורמה
המשוונית ללא מנגנון ההנעה. 14א: מבט מצד המסילה הצפונית. 14ב: מבט מצד המסילה הצפונית
עם הטית לוח הבסיס. 14ג: מבט מצד המסילה הדרומית
·
ציור 15: מנוע הצעד
מורכב במחזיק הייעודי
·
ציור 16: המנוע
מורכב על מחזיק הגלגלים השמאלי של המסילה הצפונית
·
ציור 17: מיקום המיקרוסויצ'ים על לוח הקרקע משני קצוות המסילה הצפונית.
·
ציור 18: קופסת
האלקטרוניקה האחראית על הפעלת המנוע
·
ציור 19: פלס
הבועות שחובר לפלטפורמה
·
ציור 20: הפלטפורמה
המשוונית מוכנה
·
ציור 21: הכוונת
הפלטפורמה המשוונית [2].
·
ציור א1: מחזיק
ימני של גלגלי המסילה הצפונית
·
ציור א2: מחזיק
שמאלי של גלגלי המסילה הצפונית
·
ציור א3: מחזיק
ימני של גלגלי המסילה הדרומית
טלסקופ
דובסוני מהווה חלופה נאה לכל מי שאין ידו משגת לקנות טלסקופ שובר אור או
מקסוטוב-קאסגריין בעל מפתח גדול. אולם אחת הבעיות הגדולות של טלסקופים דובסוניים הינה הכן האזימוטאלי אשר
אינו מאפשר עקיבה על ידי הנעת דרגת חופש אחת, כשם שנעשה בחצובה משוונית.
הנעת
הטלסקופ נעשית לרוב ידנית ולצורך עקיבה יש צורך לבצע תיקונים תכופים אשר אינם
מאפשרים צפייה רצופה. כל שכן אין הם מאפשרים צילום האובייקטים השמימיים.
לצורך
פתרון הבעיה יש לבנות לטלסקופ פלטפורמה משוונית, המאפשרת עקיבה רצופה, המפצה על
תנועת העצמים השמימיים עקב תנועת כדור הארץ [1].
במאמר
זה מתואר תהליך בנייתה של פלטפורמה כזו המותאמת לשמי ישראל. בפרק 2 מתוארת בעיית
העקיבה הנובעת מסיבוב כדור הארץ. בפרק 3 מתוארות שתי הגישות העיקריות לבניית חצובה
משוונית והתאמתן לשמי ישראל. בפרק 4 מתוארת התיאוריה הבסיסית עליה מושתת תכנון
הפלטפורמה על סמך התכנון הבסיסי של Warren Peters [1]. בפרק 5 מתוארים החלקים הבסיסיים
ושלבי בניית החצובה. בפרק 6 מתואר שלב כיול הפלטפורמה לתנועת שמי הארץ.
2)
תנועת כדור הארץ ובעיית העקיבה.
כדור
הארץ נע סביב צירו בתדירות של אחת ל-24 שעות. ציר הסיבוב של כדור הארץ מצביע
לכיוון כוכב הצפון (POLARIS) כנראה בציור 1. צופה על פני כדור הארץ יראה את הכוכבים עולים
במזרח ויורדים במערב עם תנועת כדור הארץ. מטרת הפלטפורמה המשוונית היא ליצור עבור
הטלסקופ הדובסוני ציר סיבוב המצביע אל כוכב הצפון ולסובב את המשטח עליו הוא יושב
באותו כוון ומהירות בהם נעים הכוכבים, היינו בניגוד לכיוון סיבוב כדור הארץ. ציר
הסיבוב בישראל נמצא בכיוון צפון, בזווית הגבהה (LATITUDE) של כ-32 מעלות מעל האופק, ערך
השווה לזה של קו הרוחב בו נמצאת תל-אביב. במקומות צפוניים או דרומיים בישראל ערך
זה עשוי להשתנות מ-33 מעלות בצפון ל29-30 מעלות בדרום הארץ. בעבודה הנוכחית נלקח
ערך זווית הגבהה של 31.8 מעלות.
מהירות
הסיבוב של הפלטפורמה צריכה להיות סיבוב
שלם ביום. על ידי התאמת מהירות הסיבוב
וציר הסיבוב ניתן לבצע, באמצעות פלטפורמה מתוכננת היטב, עקיבה לפרק זמן
ארוך של עד 40-60 דקות.
לצורך
המחשה ראה ציורים 1א ו-1ב [1]. דמיין שהינך יכול ליצור חרוט אשר צידו
הפתוח מכוון לכוכב הצפון וצירו נמצא בזווית ההגבהה המתאימה לאזורינו על פני כדור
הארץ. כאשר מגיעים לבניית פלטפורמה אין אנו שואפים לכסות את כל החרוט (דבר שהיה
מאפשר לנו צפייה רצופה של 24 שעות) אלא רק את תחתיתו, המאפשרת צפייה לפרק הזמן
הקצוב.
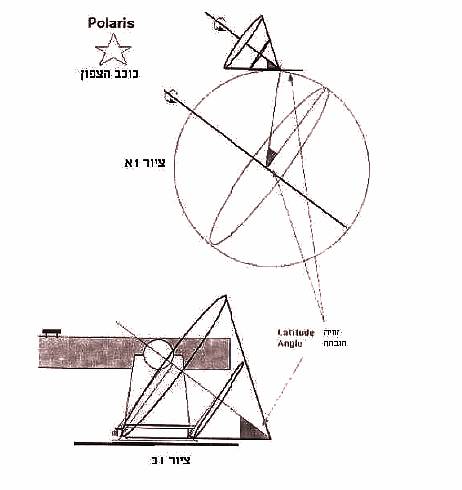
ציור 1: תנועת כדור הארץ ושיטת העקיבה הנחוצה [1]
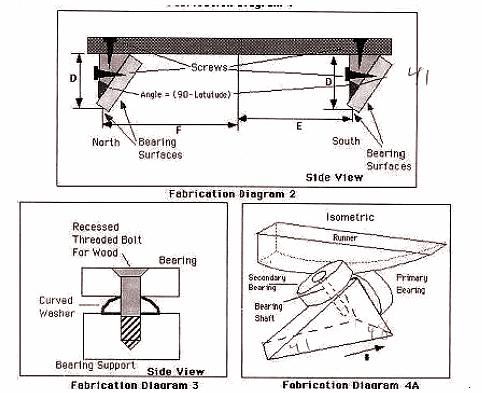
הגישה
הטכנית לפתרון הבעיה מתוארת בציור 2 [1]. הפלטפורמה המשוונית מכסה את תחתית חרוט
הסיבוב על ידי משטח המונח על שתי מסילות הנעות על גלגלים. רדיוס התנועה של המסילות
תואם לרדיוס הסיבוב שיוצר החרוט, בהתאם למיקום המסילות ביחס לציר הסיבוב של החרוט.

ציור 2: הגישה הטכנית לפתרון בעיית העקיבה [1]
המסילה
הצפונית בעלת רדיוס סיבוב גדול בשל היותה המרוחקת יותר ממוקד החרוט והדרומית בעלת
רדיוס סיבוב קטן יותר בשל היותה קרובה יותר למוקד.
שתי
המסילות מחוזקות יחדיו אל לוח הבסיס עליו יושב הטלסקופ. מימדי חרוט הסיבוב חשובים
משום שמרכז הכובד של הטלסקופ צריך להתלכד עם ציר הסיבוב, דבר שיוסבר בהמשך.
3)
גישות לבניית פלטפורמה משוונית.
ישנן
שתי גישות עיקריות לבניית פלטפורמה משוונית:
·
פלטפורמה בעלת מסילה צפונית
ומסילה דרומית. זו הפלטפורמה המתוארת בציור 2 ומהווה את הגישה
ה"מסורתית" לבניית פלטפורמות משווניות [1]. גישה זו הינה קומפקטית יותר
מבין האפשרויות המפורטות, אולם מורכבות הבניה גבוהה יותר מבחינת התכנון והבניה,
במיוחד כאשר מגיעים לכיוון כל ה גלגלים עליהם נעות המסילות.
·
פלטפורמה בעלת מסילה צפונית ומיסב דרומי. בפלטפורמה זו, הנראית בציור 3 [2] מחליף מיסב דרומי
את המסילה הדרומית. תכנון זה פשוט יותר אולם מתאים בעיקר לטלסקופים קטנים שכן
יציבות ההתקן פחות טובה מאשר זו של ההתקן בעל שתי מסילות.

ציור 3: פלטפורמה משוונית בעלת מיסב
דרומי (באדיבות אנדרי הייקופ
[2])
קיימות
שתי אפשרויות הנעה עיקריות.
·
האחת היא באמצעות הנעה ישירה
של אחד ממיסבי המסילה הצפונית, בדרך כלל השמאלי בגלל כיוון הסיבוב של המסילה הדורש
פחות כוח ברוב מסלול התנועה (ראה ציור 3).
·
גישה שנייה הנראית בציור 4
הינה הנעת לוח הבסיס היושב על מיסבים באמצעות בורג חלזוני.
הגישה
הראשונה הינה הפשוטה יותר ומתאימה למקרה בו משתמשים בגלגלי רולר בליידס בתור מיסבי
סיבוב. שיטה זו דורשת מהירות סיבוב נמוכה מאוד המחייבת מנוע (בדרך כלל מנוע צעד)
עם גיר בעל יחס ניחות (Reduction Ratio) גבוה מאוד, אשר נדיר יותר למצוא ומחירו
גבוה. הגישה השנייה מסובכת יותר לבניה אולם מאפשרת גמישות תכנונית גבוהה יותר
וחלקים זמינים יותר. מצד שני ה – Backlash הנוצר בשל הנוכחות של הבורג החלזוני גבוה יותר
ויוצר שגיאת תנועה גבוהה יותר מאשר בהנעה הישירה.
שתי
שיטות ההנעה טובות למיקומה של ישראל על פני כדור הארץ. במקרה הנוכחי נבחרה שיטת
ההנעה הישירה.
לעומת
זאת, כאשר ניגשים לבניית פלטפורמה משוונית, מיקומה של ישראל אינו מאפשר כמעט בחירה
בין גישות הבניה השונות.
היות
וישראל ממוקמת בחצי הכדור הצפוני אולם על קו רוחב נמוך יחסית (30-33 מעלות) אין
גישת הבניה של מיסב דרומי מתאימה. זווית ההגבהה הנמוכה יחסית מחייבת רדיוס סיבוב
דרומי גדול ובשל כך המיסב הדרומי חייב להיות גבוה מעל לוח הבסיס ודרומית לו. דבר
זה גורם למספר בעיות:
·
מבנה כבד, מסורבל וקשה לשינוע.
·
פלטפורמה בעלת מרכז כובד גבוה
הגורמת לחוסר יציבות של ההתקן כולו במיוחד כאשר הינו מיועד לטלסקופים גדולים.
·
מעמסה גבוהה על המיסב הדרומי
כתוצאה ממאמצים מכאניים גבוהים עליו ועל התומכות המחוברות אליו, הגורמת לשחיקה
גבוהה ולעיוות אפשרי שיוציא את הפלטפורמה מכיוון לאחר זמן מה, במיוחד כאשר המבנה
עשוי מעץ.
בציור
3 מתוארת פלטפורמה משוונית מבוססת על שיטה זו אשר נבנתה עבור קו רוחב 58 מעלות
[2]. למדינה צפונית זו (הולנד) השיטה הינה טובה ועובדת היטב, דבר שאינו נכון לגבי
ישראל.
לפיכך
עדיף המבנה בעל שתי המסילות בגלל היותו קומפקטי, יציב ומדויק לאורך זמן למרות
היותו מורכב יותר לבנייה
.

ציור 4 : הנעה באמצעות בורג חלזוני [3]
4)
התיאוריה הבסיסית של פלטפורמה משוונית בעלת שתי מסילות והנעה
ישירה
(על פי Warren
Peters [1])ׂ
בציור
5 מתואר סכמאטית מבט צד של פלטפורמה משוונית עם שתי מסילות והנעה ישירה של אחד
מגלגלי המסילה הצפונית, באמצעות מנוע עם גיר. בציור מתוארים כל המימדים הרלוונטיים
לתכנון.
הפלטפורמה
כולה יושבת על לוח הקרקע עליו מורכבים הגלגלים עליהם מסתובב לוח הבסיס המכיל את
מסילות התנועה הצפונית והדרומית.

ציור 5: מבט צד של פלטפורמה משוונית עם
שתי מסילות והנעה ישירה
הגיאומטריה
של הפלטפורמה פשוטה וניתנת לניתוח באמצעות שלבי הבניה הבאים:
·
צור קו ייחוס במקביל לקרקע
והנמצא מרחק קטן (8-
·
מדוד את גובה מרכז הכובד של
הטלסקופ.
בהרבה מקומות ניתן למצוא התייחסות לגובה זה, אשר
אמור לכלול את משקל החצובה האזימוטאלית (ה-Rocker
Box). חשוב מאוד
שמרכז הכובד של החצובה יהיה גבוה מאשר זה של הטלסקופ (אף שהמחיר הוא מבנה גדול
יותר), אחרת ייווצר מצב בו הטלסקופ עלול ליפול מהחצובה כאשר היא בהטיה ביחס לקרקע
(במיוחד לקראת סוף המסלול). לפיכך רצוי לבחור את גובה מרכז הכובד כמיקום בו נמצאים
מיסבי ההגבהה (Altitude Bearings) של הטלסקופ.
·
מצא את זווית ההגבהה של המיקום
בו הטלסקופ מוצב.
·
צור את המשולש ישר הזווית AEH. זווית המשולש הינה זווית ההגבהה α. בסיס המשולש AH הינו קו הייחוס.
·
צור את המשולש ישר הזווית ABJ. J הינו המיקום בו המסילה הדרומית פוגשת את
גלגלי הסיבוב שלה. בסיס המשולש AB הינו ציר חרוט הסיבוב.
·
צור את המשולש ישר הזוית ACG. G היא נקודת המפגש של המסילה הצפונית עם
גלגלי הסיבוב שלה. בסיס המשולש AC הינו ציר חרוט הסיבוב.
בציור
5 מתוארת הגיאומטריה הבסיסית של הפלטפורמה. שימו לב למימדים CG ו-BJ המתארים את רדיוסי הסיבוב של המסילות
הצפונית (Rnb) והדרומית (Rsb), בהתאמה.
4.1)
שיטת חישוב
בקובץ
ה-Excel המצורף מתוארים החישובים הנחוצים למציאת מימדי הפלטפורמה והתוצאות
של מימדים אלו על סמך השרטוט בציור 5.
המשתנים
השונים מתחלקים ל3: נתוני כניסה, משתני כניסה ונתוני מוצא.
4.1.1)
נתוני כניסה:
·
A- גובה מרכז הכובד (CG) מעל לוח הבסיס. נקודת מרכז הכובד צריכה
להתלכד עם ציר חרוט הסיבוב.
·
C- אורך ורוחב לוח הבסיס. וודא שמימדים אלו
גדולים מאלו של החצובה האזימוטאלית של הטלסקופ.
·
α- זווית ההגבהה בהתאם למיקום הטלסקופ
(שווה לערך קו הרוחב במיקום זה).
4.1.2) משתני כניסה:
אילו
הנתונים עליהם יש למתכנן שליטה לפני תחילת חישוב וניתנים לשינוי בכל שלב לפני
תחילת הבנייה.
·
עובי לוח הבסיס – B.
·
מרחק לוח הבסיס מקו הייחוס – D.
·
מרחק מרכז לוח הבסיס מנקודת
המגע של המסילה הדרומית עם גלגלי ההינע – E (על גבי קו הייחוס).
·
מרחק מרכז לוח הבסיס מנקודת
המגע של המסילה הצפונית עם גלגלי ההינע – F (על גבי קו הייחוס).
·
רדיוס גלגל ההנעה של מנוע
הצעד-
RM - רדיוס ציר המנוע המניע את הגלגלת הצפונית אשר נמצאת במגע עם
המסילה הצפונית.
·
זווית הסיבוב לכל צעד של
המנוע- SS.
·
זווית הסיבוב המכסימאלית של
לוח הבסיס סביב ציר חרוט הסיבוב –β – הזוית המכסימאלית אליה
תגיע הפלטפורמה במהלך התנועה. במקרה זה נלקחה הזווית כ- 11.25 מעלות. ערך התואם
ל-90 דקות של תנועה. ערך זה גבוה מהתכנון המקורי של כ60- דקות, כדי ליצור שולי
ביטחון בתכנון.
4.1.3)
נתוני מוצא
ערכים אלו מהווים את מימדי הפלטפורמה הנובעים
מערכי נתוני הכניסה ומשתני הכניסה הנתונים בסעיפים הקודמים. ערכים אלו מתחלקים
לערכי הרדיוסים, נתוני מהירות מנוע, ממדי המסילות הדרומית והצפונית ומיקום
הגלגליות המניעות אותן.
4.1.3.1)
ערכי הרדיוסים:
·
רדיוס מסילה צפונית Rnb
= ( [(A+B+D)/{tan(α)}]+F ) * sin (α)
·
רדיוס מסילה דרומית Rsb
= ( [(A+B+D)/{tan(α)}]-E ) * sin (α)
4.1.3.2) ערכי מהירות המנוע:
·
מהירות סיבוב המנוע (מתוכנן ל90 דקות תנועה)
:
·
מספר צעדים לשנייה של מנוע
הצעד:
![]()
4.1.3.3) ממדי המסילות (ראה ציור א6)
·
אורך המסילה הצפונית – Ln.
ערך זה שווה לרוחב לוח הבסיס.
·
גובה המסילות : ![]()
·
אורך המסילה הדרומית: ![]()
הערה: גובה המסילות שווה כדי ליצור מבנה מקביל לפני
הקרקע.
4.1.3.4)
מיקום גלגלי או מיסבי ההנעה של המסילות (ראה ציור 6ב ו-6ג)
מיקום
גלגלי ההנעה של המסילות הצפונית והדרומית חשוב ותלוי בזוית הסיבוב המכסימאלית של
לוח הבסיס. מיקומם נקבע כנקודה בה מסתיימת המסילה כאשר לוח הבסיס מוטה בזווית
הסיבוב המכסימאלית (β)
·
זווית ההטיה של גלגלי הסיבוב
של המסילה הצפונית: ![]()
·
זווית ההטיה של גלגלי הסיבוב
של המסילה הדרומית: ![]()
·
מיקום גלגלי הסיבוב של המסילה
הצפונית: ![]()
·
מיקום גלגלי הסיבוב של המסילה
הדרומית: ![]()

ציור 6 מימדי
המסילות ומיקום גלגלי ההנעה שלהן [1]

ציור 7: דף Excel (ע"פ Warren Peters) עם פרוט נתוני הפלטפורמה
המשוונית בסנטימטרים שנבנתה עבור זווית הגבהה של 31.8 מעלות.
הטלסקופ עבורו תוכננה הפלטפורמה הינו StarHopper
10" של Celestron
בציור
7 מתואר דף ה-Excel בו מצויים נתוני הכניסה והמוצא (בסנטימטרים ומעלות) בהתאם למתואר לעיל
עבור זווית הגבהה של 31.8 מעלות. הטלסקופ עבורו תוכננה הפלטפורמה הינו Starhopper 10" של Celestron.
5) החלקים הבסיסיים ושלבי בניית הפלטפורמה
בנית
הפלטפורמה התבססה על התכנון המפורט בסעיף הקודם. כאמור הפלטפורמה נבנתה עבור
טלסקופ דובסוני Starhopper 10" של Celestron. באמצעות הפלטפורמה המשוונית ניתן עקרונית לעקוב אחר כוכבי לכת
ואובייקטים אחרים למשך 45 עד 60 דקות. הפלטפורמה מבוססת על המימדים הנתונים בציור
7.
חומרים
בסיסיים ששימשו לבנית הפלטפורמה:
·
לוח עץ סנדוויץ' בעובי 17 ממ'.
·
קרשי עץ בעלי חתך 45x90 ממ'
·
קרש עץ בעל חתך 90x90 ממ'
·
מסילות אלומינים
בעובי 2ממ' ורוחב 35 ממ'.
·
גלגלים של רולר בליידס בקוטר 80ממ' וקשיות 82A + מיסבי ABEC
5 עם Spacers תואמים
·
מנוע צעד של Hurst דגם: LSG35012E98P
ראה: http://www.myhurst.com/hurstmfg/qseries.jsp?series=Series+LSG35+Geared+Stepping+Motor&metric=1
·
מעגל הנעה למנוע הצעד.
בעבר נעשה שימוש במעגלים המכילים רכיב מסוג UCN5804B. בשל הפסקת ייצורו של רכיב זה (עדיין ניתן למצוא רכיבים תואמים בארץ ב"אריהב" בשדרות הר-ציון בתל אביב) רצוי להשתמש בחלופות. אחת מחלופות אלו ניתן למצוא ב"Alltronics" בארצות הברית (קיט 179): http://www.alltronics.com/cgi-bin/category/29.
יש לבצע למעגל מספר שנויים ותוספות שיתוארו בהמשך.
·
גלגל דלרין
או אלומיניום בקוטר 13-20 ממ' (אשר מוצמד לציר מנוע הצעד)
חלקי
לוח הבסיס ולוח הקרקע נראים בציור 8. מחזיקי המסילות ולוח הבסיס נחתכו מפלטת סנדוויץ'
בעובי של 17 ממ'. כל מחזיק מסילה מורכב משתי קשתות זהות אשר חוברו יחדיו ליצירת
מחזיק בעל עובי של 34 ממ'. חיתוך המסילות
נעשה על ידי משור חשמלי על ידי יצירת מחוגת עץ המקובעת על ציר בצידה האחד ובצידה
השני מורכב המשור. שיטה זו מתוארת במאמר של André Heijkoop’[2], מתוכו נלקח ציור 9 בו מתוארת ויזואלית שיטת החיתוך.

ציור 8: חלקי לוח הבסיס
ולוח הקרקע

ציור 9: חיתוך מחזיקי המסילות באמצעות מסור חשמלי (באדיבות André
Heijkoop’ [2])
מחזיקי
הגלגלים נחתכו בזויות המתאימות (ערכן
נקבע מתוך דף ה-EXCELL בציור 7) באמצעות משור ידני מקובע, בעל זוויות הטיה
משתנות. המחזיק השמאלי של גלגלי המסילה הצפונית נחתך ממוט עץ בעל חתך 90X90 ממ', בעוד שכל מחזיקי הגלגלים האחרים נחתכו ממוט עץ בעל חתך 45X90 ממ'. הסיבה לכך היא הצורך למקם את מנוע הצעד בצמוד לגלגל השמאלי
של המסילה הצפונית.
לשם
הקטנת הסיכוי לשגיאות שרטטתי את מחזיקי הגלגלים השונים בהקטנה פי 2, שרטוטים שהיו שימושיים מאוד בזמן ההרכבה. את השרטוטים נתן לראות
בנספח א'.
בציור
10 מתוארים מחזיקי הגלגלים עם הגלגלים מורכבים עליהם. שיטת הידוק הגלגלים אל
המחזיקים מתוארת בפירוט במראה מקום [1], משם נלקח ציור 11 בו מתוארת ויזואלית שיטת
הצמדת הגלגלים אל המחזיקים. חשוב לבצע חור מוביל ניצב במדויק לפני השטח עבור בורג
העץ המהדק כל אחד מהגלגלים אל המחזיק. הלחץ המופעל על המיסבים
הוא גדול ולכן חשוב לבחור מיסבים איכותיים, אחרת
הלחץ שמפעיל הבורג עלול ליצור מעוותים שיגרמו לחיכוך מיותר במיסב העשוי לא טוב ולצריכת אנרגיה מיותרת מהמנוע.

ציור 10: מחזיקי הגלגלים עם הגלגלים מורכבים
עליהם.
10א: מחזיקי
הגלגלים של המסילה הצפונית: 10ב: מחזיקי הגלגלים של המסילה הדרומית:
. 
ציור 11: שיטת הצמדת הגלגלים אל מחזיקי הגלגלים ומיקומם על פני
המסילות
(מתוך המאמר של Warren
Peters [1])
בציור
12 נראה לוח הבסיס לאחר הרכבת מחזיקי המסילה, עם מסילות האלומיניום עליהם. למניעת
ספיחת לחות אפשרית צופה כל המבנה עם לכה פוליאוריטנית
אל
לוח הבסיס הוצמדו כפיסי עץ נוספים המשמשים לקביעת סוף המסלול ומפעילים מיקרוסויצ'ים העוצרים את פעולת המנוע עם הגעה לסוף המסילה.

ציור 12: לוח הבסיס המוגמר
מחזיקי
הגלגלים הוצמדו אל לוח הקרקע כפי שניתן לראות בציור 13. הצמדתם נעשתה לאחר כיוון
מדויק של מחזיקי הגלגלים במקומם (כפי שנקבע מתוך דף ה-EXCELL בציור 7). לצורך זה רצוי שיבצעו את
ההרכבה שני אנשים, המבצעים כל אחד הכוונה של מסילה אחרת, תוך הקפדה על מגע הגלגלים
במסילות לכל אורך מסלול התנועה.

ציור 13: לוח הקרקע עם מחזיקי הגלגלים מורכבים עליו
 בציור
14 נראית הפלטפורמה מורכבת ללא מנגנון ההנעה.
בציור
14 נראית הפלטפורמה מורכבת ללא מנגנון ההנעה.
בשלב
זה ניתן להניע את לוח הבסיס כנראה בציור 14ב ולחוש האם התנועה חלקה וכל הגלגלים
נעים.
במידה
ולא כולם נעים יש לפרק את המחזיק המתאים ולחברו כראוי מחדש לאחר כיוון.
במידה
והגלגלים לא נעים במקביל למסילה ישמע קול חיכוך של הגלגלים על המסילה.
במקרה
זה יש לפרק את המחזיק ולבדוק האם הגלגל מורכב במקביל למשטח המחזיק, או לחילופין,
המחזיק אינו מורכב במקביל למסילה.
ציור 14: הפלטפורמה המשוונית
ללא מנגנון ההנעה. 14
א: מבט מצד המסילה הצפונית.
14ב: מבט מצד המסילה הצפונית
עם הטית לוח הבסיס.
14ג: מבט מצד המסילה הדרומית
מנגנון
ההנעה מבוסס על מנוע צעד של Hurst דגם LSG35012E98P. מנוע זה ניתן למצוא בחנויות "יד
שנייה" בארצות הברית . בעלות סבירה ניתן למצוא את המנוע בחנות האינטרנט: www.electrosales.com. השירות טוב והעלות סבירה.
בציור
15 נראה המנוע מורכב במחזיק מתכתי ייעודי. על ציר המנוע הורכב גליל דלרין המתווך בין ציר המנוע לגלגל הרולר בלייד
המניע את המסילה הצפונית (ממוקם על המחזיק השמאלי)

ציור 15: מנוע הצעד מורכב במחזיק הייעודי
המנוע
בתוך מסגרת המחזיק הורכב על מחזיק הגלגלים השמאלי של המסילה הצפונית והוצמד לגלגל
הרולר בלייד המניע אותה, כפי שניתן לראות בציור 16.
הצמדת
גליל הדלרין, המחובר לציר המנוע, אל גלגל הרולר בלייד נעשתה על ידי קפיץ המחובר בצידו האחד אל מסגרת המנוע
ובצידו השני אל מנוף מתיחה המאפשר הצמדתו ושיחרורו של
המנוע אל הגלגל לפי הצורך.

ציור 16: המנוע מורכב על מחזיק הגלגלים השמאלי של המסילה
הצפונית
המעגל
האלקטרוני המניע את המנוע מבוסס על קיט 179 של ALLTRONICS. המעגל החשמלי הותאם לדרישות הפלטפורמה.
שינויים עיקריים שבוצעו במעגל:
·
אל הטרימר
של ה-100kΩ חובר בטור פוטנציומטר לינארי של 50kΩ בעל 10 סיבובים לצורך שליטה עדינה על מהירות התנועה.
·
הוסף מפסק המקצר את הטרימר והפוטנציומטר לקבלת תנועה מהירה של הפלטפורמה.
·
אל אספקת המתח למנוע נוסף בטור
נגד של 20Ω בהספק של 10Watt , לצורך הגנה במקרים של קצר אפשרי.
·
אל כל אחד מארבעת קוטבי המנוע
חוברה דיודה ,1N4007 כאשר האנודה מחוברת לקוטב המנוע והקטודה לאספקת המתח למנוע דרך נגד ההספק. זאת למניעת נזק לטרנזיסטורי ההספק כתוצאה מנחשולי מתח הנובעים מסלילי המנוע.
·
אל כניסות טרנזיסטורי
ההספק הדוחפים את המנוע חוברו 4 לדים הנותנים אינדיקציה
על פעולה תקינה ומושג לגבי קצב התנועה של המנוע.
·
שני מיקרוסויצ'ים
הממוקמים על לוח הקרקע בשתי קצות המסילה הצפונית חוברו בטור לאספקת המתח למנוע,
לצורך הפסקת פעולתו עם הגעה לסוף המסילה (ראה ציור 17).
המעגל
החשמלי הורכב בקופסת פלסטיק הנראית בציור 18 (ניתנת להשגה בחנויות ארכה)
הפוטנציומטר, הלדים ומפסקי ההפעלה השונים (מפסק הפעלה,
מפסק חיבור למנוע, מפסק שינוי כיוון תנועה, מפסק מעבר לתנועה מהירה) הורכבו על
הפאנל הקדמי של הקופסה.

ציור 17: מיקום המיקרוסויצ'ים על לוח הקרקע משני
קצוות המסילה הצפונית.

ציור 18: קופסת האלקטרוניקה
האחראית על הפעלת המנוע
18א: קופסת האלקטרוניקה כאשר
מוסר הפנל הקדמי.18ב: תוכן קופסת האלקטרוניקה. 18ג: הפנל הקדמי.
לצורך
פילוס הפלטפורמה בזמן כיולה חובר ללוח הבסיס
פלס בועות הנראה בציור 19.

ציור 19: פלס הבועות שחובר לפלטפורמה


בציור 20 נראית הפלטפורמה מוכנה עם
וללא הטלסקופ מורכב עליה
ציור 20: הפלטפורמה המשוונית מוכנה
הכוונת הפלטפורמה ניתנת להיעשות באמצעות הview
finder- של
הטלסקופ. כוון את הטלסקופ אל כוכב הצפון והזז את הפלטפורמה לפי ההוראות בציור 21
(נלקח מתוך עבודתו של André
Heijkoop’[2]).

ציור 21: הכוונת הפלטפורמה המשוונית [2].
7) תודות
תודות חמות לחמי מר חנוך כהן וחברי מר אבי מאיר על סיועם הרב.
בלעדי עזרתם לא היתה נשלמת העבודה.
ברצוני להודות למר אנדריי הייקופ (Andre Heijkoop) מהולנד על עיצותיו
הנבונות וסיועו הרב.
למר Warren Peters תודות על המאמר המעולה וגליון
הEXCELL- אשר אפשר את עבודת התכנון.
[1] Cylindrical Bearing Equatorial Platform By
Warren Peters http://tech.groups.yahoo.com/group/eqplatforms/files/Sacred%20Files/Warren%20Peter/
[2]
André Heijkoop’s equatorial platform
http://tech.groups.yahoo.com/group/eqplatforms/files/Andre%20Heijkoop/
[3] Regan's Dob tracker
http://www.geocities.com/reaganjj/
נספח
א': שרטוטי מחזיקי הגלגלים של המסילות הצפונית והדרומית:

ציור א1: מחזיק ימני של גלגלי המסילה הצפונית:
ציור א2: מחזיק שמאלי של גלגלי המסילה
הצפונית

ציור א3: מחזיק ימני של גלגלי המסילה הדרומית (המחזיק השמאלי של
גלגלי המסילה הדרומית אינו משורטט מפני שהוא תמונת שיקוף של שרטוט זה)
לפרטים
נוספים, צרו קשר עם מצפה הכוכבים ברקת במכבים :
08-9264-150
